贾永楠, 田似营, 李擎. 无人机集群研究进展综述[J]. 航空学报, 2020, 41(S1): 723738.
JIA Y N, TIAN S Y, LI Q. Recent development of unmanned aerial vehicle swarms[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723738.
无人机集群研究进展综述
贾永楠1,
田似营2,
李擎1

1.
北京科技大学 自动化学院, 北京 100083;
2.
海鹰航空通用装备有限责任公司, 北京 100074
收稿日期: 2019-12-17; 退修日期: 2019-12-20; 录用日期: 2019-12-22; 网络出版时间: 2019-12-27 16:06
基金项目: 国家自然科学基金(61603362);中央高校基本科研业务费专项资金(FRF-TP-19-031A2)
通信作者: 李擎, E-mail: liqing@ies.ustb.edu.cn
摘要: 集群行为是一种常见于自然界中鱼群、鸟群、蜂群等低等群居生物的集体行为,生物群中的个体仅依靠局部感知作用和简单的通信规则自主决定其运动状态,并且从简单的局部规则涌现出协同的整体行为。受此启发,提出了无人机集群作战的概念。无人机集群作战是指依靠大量低成本、速度快、适应能力强、易于携带和投射的无人机形成规模优势,从而取得战争的主动权。由于无人机集群技术的重要战略地位,中美俄等军事大国均开始重视无人机集群技术的持续发展。介绍了无人机集群的研究动机,从模型、协议和平台3个角度总结了研究方法,重点分析了几种典型作战模式以及涉及的若干关键技术。综上所述,集群技术在军事方面具有重要的应用价值,必将引领全新的作战模式。
关键词: 无人机 集群技术 大规模系统 人机协同 分布式控制
Recent development of unmanned aerial vehicle swarms
JIA Yongnan1,
TIAN Siying2,
LI Qing1
1.
School of Automation and Electrical Engineering, University of Science and Technology Beijing, Beijing 100083, China;
2.
Hiwing Aviation General Equipment Co. Ltd. Beijing, Beijing 100074, China
Received: 12-17-2019; Revised: 12-20-2019; Accepted: 12-22-2019; Published online: 2019-12-27 16:06
Foundation item: National Natural Science Foundation of China (61603362); Fundamental Research Funds for the Central Universities (FRF-TP-19-031A2)
Corresponding author. LI Qing, E-mail:liqing@ies.ustb.edu.cn
Abstract: Swarm as a typical collective behavior is omnipresent in animal kingdom, such as fish schooling, bird flocking, and bee swarming. In a colony, large-scale synchronous behavior emerges by virtue of local sensing and very simple communication rules. Inspired by these collective performances, the swarm of unmanned aerial vehicles is proposed as a new combat pattern. These unmanned aerial vehicles are characterized by large quantity, low cost, high speed, well adaptability, and convenient carried/launched mechanism, contributing to the scale advantage of UAVs and the possession of war initiative In recent years, many military powers, such as China, Russia, United States, have made great effort to the continuous development of swarm-related technology of unmanned aerial vehicles. To resolve the swarming problem of unmanned aerial vehicles, this paper introduces the research motivations of UAVs, summarizing the research approaches from modeling, control protocol, and execution platform. Besides, several classical combat modes and involved key technologies are discussed in detail. Above all, the swarm-related technology has bright application potential in the military area, leading to a brand new combat pattern.
Keywords: unmanned aerial vehicles swarming technology large-scale system man/unmanned cooperative control distributed control
无人机集群作战,是近年来提出的一种全新作战模式。在不降低作战效能的前提下,集群作战被认为是缩减军费开支的有效手段之一[-]。所谓集群作战,灵感源自于蜂群、鱼群、鸟群等具有较低智能的生物在迁徙、巡游或是躲避敌害过程中呈现出来的集群行为。依靠简单的规则和局部通信,呈现出整体的行为,并借助数量优势在与具有较高智能的生物对抗中占据主动权。在现代战争中,制空权往往是决定战争胜负的关键因素。无人机在空中的高度优势,使得无人机系统成为实现集群作战的首选无人验证平台。
2017年11月在日内瓦举办的联合国特定常规武器公约会议上,当手掌大小的无人机以集群的方式通过面部识别同时射杀多名锁定对象的视频一经发布,就引发了巨大轰动。也标志着无人机集群作为一种新的作战形态已经进入了全世界军方的视线。
实际上,国内外诸多研究团队一直不断积累无人机集群飞行相关理论[-]。随着近年来无人机技术的发展与成熟,集群无人机的实现也成为了可能。
美国军方最早开始无人机集群相关研究的布局。自2014年起,美国国防部战略能力办公室、美国海军、国防高级研究计划局(DARPA)先后启动“无人机蜂群”项目、“低成本无人机技术蜂群”和“小精灵”项目。“无人机蜂群”项目以“灰山鹑”一次性微型无人机为试验平台,于2016年测试了由3架F/A-18战斗机释放103架“灰山鹑”,展示了空中投放和自适应分组编队的协同飞行能力。“低成本无人机技术蜂群”项目是以“郊狼”小型无人机为平台,于2016年验证了30 s投放30架无人机的能力。“小精灵”项目重点研究由C-130运输机空中投放和回收小型无人机蜂群等关键技术。除了围绕低成本设计的微小型无人机集群飞行,DARPA还通过“体系集成技术”“分布式作战管理”“进攻蜂群战术”“拒止环境协同”等项目,发展无人机蜂群体系架构、作战管理、蜂群战术、自主协同和小型多功能传感器等多项关键技术。2018年11月19日,美国空军公开了36架F-35A隐身战斗机的集群飞行演习(见),在短时间内连续放飞了数十架F-35A战斗机,展示了F-35A密集编队起飞能力。

2016年9月,英国国防部发起了无人机蜂群竞赛,以期快速突破相关关键技术。同年11月,欧洲防务局正式启动“欧洲蜂群”项目,发展任务自主决策、协同导航等关键技术。同一年,俄罗斯也开始开展蜂群无人机协同作战模式研究。韩国陆军则在2017年宣布将大力发展无人机蜂群技术,用于侦察、打击等任务。2019年10月23日,芬兰提出“压制防空无人机蜂群”(SEAD Swarm)项目,将作为加强欧盟成员国之间合作而进行的防务研究备战行动的一部分。
中国军方也开始密切关注并大力推动无人机集群相关技术的进展。2016年11月17日,中国电子科技集团(以下简称中电科)(CETC)公布了67架弹射固定翼无人机的室外集群飞行试验(见)。2017年6月,中电科再次组织了一项由119架小型固定翼无人机构成的集群飞行试验,演示了密集弹射起飞、空中集结、多目标分组、编队合围、集群行动等动作。2018年5月,中电科又一次成功完成了200架固定翼无人机集群飞行,同时还成功实现了国内首次小型折叠翼无人机双机低空投放和模态转换试验。但与美军一系列公布的军方成果相比,差距还是比较明显。为推动集群相关技术的发展,2018年6月,中国空军在中国涞水主办了第1届“无人争锋”智能无人机集群系统挑战赛,标志着集群技术已经正式进入中国军方视线,探索未来智能无人集群技术的发展与应用正式提上日程。然而,此次比赛中,多个科目获奖队伍空缺,表明无人机集群技术依然有诸多难点亟待攻克,相关研究仍然处于起步阶段。

本文组织结构如下:第1部分概述集群的研究动机,第2部分则重点阐述无人机集群的研究方法,第3部分讨论了无人机集群的典型作战模式及关键技术。
1 研究动机第一,虽然美国现在的无人机数量和技术成熟度全球领先,但随着俄罗斯、中国等国家加大了无人机方面的投入,与美国之间的差距也在不断缩短。同时,为应对复杂多变的战场环境,对无人机的隐身性能、机动性能、任务载荷等提出更高的要求,使得大型战略威慑型无人机的成本持续攀高。而连年作战使得美国军费吃紧。因此,美军方在考虑提高军队作战能力的同时,特别关注成本优势。试图寻找在现有技术基础之上,通过适当的改造,就可以大幅提高作战效能和灵活性的系统方案。
第二,在战场中,各种武器平台都有各自的优点和局限性。大型高价值无人机的成本通常非常昂贵,一旦被击落,损失巨大,且有泄密的可能。遗留下的残骸更有可能被敌方利用,从而在短时间内复制出同样高性能的无人机。而小型无人机系统就没有这些顾虑。小型无人机通常成本低廉、功能单一,可在现有成熟技术的基础之上通过适当改造而得到。作战时,可依靠数量规模和速度优势,取得局部战争的胜利。同时,系统的鲁棒性非常强,即使击落部分无人机,系统依然可以重新配置继续执行作战任务[]。
无人机集群作战就是在这样的条件下应运而生的一种颠覆式的低成本作战模式。无人机集群的灵感源自于自然界中鱼群、鸟群、蜂群等低等群居生物的集群行为(Swarm Behavior)。集群行为是指生物群中的个体仅依靠局部感知作用和简单的通信规则自主决定其运动状态,并且从简单的局部规则涌现出协同的整体行为[]。无人机集群作战是指依靠大量低成本、速度快、适应能力强、易于携带和投射的无人机形成规模优势,从而取得战争的主动权。
综上可以看出,小型无人机集群系统的作战效能高、作战灵活性强、作战成本可控且不易泄密,因此受到了国内外军方的高度关注。2016年8月,在中国计算机学会主办的CCF-GAIR峰会上,来自美国宾夕法尼亚大学的Kumar教授提出无人机技术的5S趋势理论:小型(Small)、安全(Safe)、智能(Smart)、敏捷(Speed)和集群(Swarm)[]。首次明确将集群智能(Swarm Intelligence)作为一种颠覆性技术。
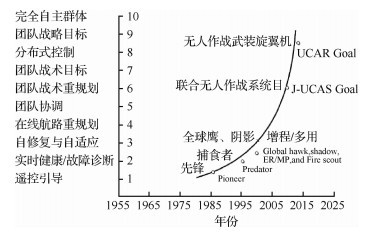
为了使无人机性能满足军事需求,美国军方先后研制了上百种无人机系统,先后提出了40余种无人机技术发展路线图。在路线图中,美军将无人机的自主控制能力进行了分级,大致从遥控、自适应、协调、分布式到群控共分为十级(见[])。可以说,无人机的集群控制就是美军目前定义的无人机自主控制能力的最高等级。美军预计在2036年全面实现无人机系统集群作战[]。
近年来,集群技术因军事领域的需求而成为研究热点。实际上,集群方面的相关研究由来已久。来自生物[-]、物理[-]、计算机[-]、控制[-]、数学[-]和机器人[-]等领域的学者一直对自然界中鸟群、鱼群、蜂群、斑马群等群居动物的集群行为保持浓厚的研究兴趣,分别从相应领域去探索集群现象产生的原因及工程应用。
描述集群行为有2种最为常见的模型,分别是Boid模型[]和Vicsek模型[]。Boid模型是1987年由美国人Reynolds提出的一种计算机模型,用于模拟鸟类等动物的群体运动。假设每只鸟只能观察到它周围固定范围内的个体,那么基于靠近、对齐和避碰3条规则就可以在计算机中复现出自然界中鸟类的集群现象。Vicsek模型则由匈牙利物理学家Vicsek等于1995年从统计力学的角度提出的,通过改变群体密度以及噪声强度,对集群行为进行定量分析。Boid模型与Vicsek模型共同构成了集群行为理论研究的基石,为后续的集群研究提供了重要的理论架构、分析工具和方法支撑。
集群行为的核心是解决群体内个体之间的协同问题,一般从通信网络[-]、协同算法[-]、仿真和实验验证[-]、任务执行[-]等方面展开研究。其中,通信网络主要用于个体间信息的传递。包括有向图和无向类。图又分为有权重图和无权重种。针对复杂系统的通信网络又诞生了一个新的分支——复杂网络控制科学[]。协同算法通常是根据个体间的相对位置和相对姿态信息结合一致性算法和人工势场法来实现。一致性算法用于个体之间的速度匹配,人工势场法则是主要用于调节个体之间的距离,包括个体间避障、队形控制和通信网络的连通性保持[, , ]。更重要的一点是,模型内部的不确定性和外部扰动(如风的影响等)会导致控制方法失效。Q学习算法[]和自适应鲁棒控制[]是目前解决集群控制中涉及的模型不确定性和外部环境干扰问题的有效方法之一。
除了基于一般的人工势场法来协调集群问题中的个体间距,Sahu和Subudhi提出了模糊人工势场法,并将其应用于集群控制中,与一般的人工势场法相比,具有更高的执行效率[]。Yazdani等则是通过设计基于采样周期的时变约束条件,来保证多智能体集群系统的连通性和个体间的避碰[]。此外,基于位置度量的模型预测控制方法已经被用于多智能体的集群控制研究中,但个体间的避碰和通信网络的连通性保持问题并未涉及[]。基于线性的模型预测控制方法也被用于执行多智能体的集群控制仿真和实验,但并未做详细的理论分析[]。在考虑输入有界的前提下,华中科技大学的研究团队分别研究了基于二阶积分器模型[]和基于Cucker-Smale模型[]的多智能体集群控制问题,设计了模型预测控制协议,给出了完整的证明,也考虑了避障的情况。在有向拓扑条件下,基于Cucker-Smale模型的多智能体集群控制问题也已经被进一步讨论,并考虑了多领航者的情况[]。滑模控制方法也被用于解决多智能体的集群控制问题,但只涉及了无人机的高度控制和方向角对准[]。因此,围绕集群控制的相关理论研究也亟待提升。
目前无人机集群技术的验证平台主要集中在旋翼无人机()和固定翼无人机()2种。旋翼机的集群技术主要应用于各种无人机灯光秀,利用群体的优势达到震撼的视觉效果。2016年,在国际消费类电子产品展览会上,英特尔公司首次公开展示了室外无人机灯光秀与现场音乐会结合的视频,创造了同时操控100架无人机集群编队的世界纪录,开创了无人机集群技术用于灯光秀表演的先河。2018年5月,国内某知名无人机公司(亿航)携1 374架无人机在西安成功打破最多无人机同时飞行的世界吉尼斯记录。然而在当晚的正式表演中,1 374架无人机并没有成功组成预定的完整图案,故障出现的原因亦引发了众多猜想与讨论。灯光秀的背后所要依靠的正是大规模无人系统的集群技术,此次西安灯光秀故障也显示出无人机集群技术的不成熟,仍有待进一步完善。


军事上,则更倾向于固定翼无人机集群。较之旋翼机集群,固定翼无人机的集群更为复杂,难度更大。主要体现在以下两点:固定翼无人机需要一定的速度来保持飞行状态,而旋翼机则可以悬停在空中;较之于旋翼机,固定翼无人机的飞行高度更高,飞行速度更快,如何实现固定翼无人机集群队形和避碰面临更大的挑战。
此外,科学家们已经不满足于集群行为的简单复现,如何提升大规模集群的效率,已经成为集群领域的另一研究热点。如何从通信网络、控制协议、模型优化等方面提升集群收敛的速度以及集群的稳定性,已经受到了研究学者的广泛关注。Boid模型和Vicsek模型都是基于个体平等的假设,即动力学模型、协同策略、通信规则都是相同的。而Couzin等提出领导者的概念,指出基于领导与被领导关系可以提升集群的效率[]。Jia和Vicsek首次提出一种研究集群行为的框架模型,可普遍用于定量分析各种集群现象。她们通过仿真的方法,对比分析了诸多现实和工程中存在的集群模型,指出存在层级化集群模型在系统稳定性方面优于常见的平等集群模型[]。
3 作战模式和关键技术分析小型无人机集群作战是美军能够快速突破敌空防一体化系统、迅速展开打击作战的杀手锏。小型无人机系统集群作战完全就是响应美军提倡的闪电战、全球快速打击等作战模式的产物,再加上其作战成本低廉、战斗敏捷性好、没有人员伤亡的顾虑,同时大量平台仅需少量的人力资源操控。因此,未来小型无人机集群系统必然成为全球作战不可或缺的武器装备之一。
3.1 作战模式分析围绕无人机系统集群作战,从狼群和蜂群的群体智慧出发,提出了蜂群作战、忠诚的僚机、组队协作、狼群作战等多种灵活多样的全新作战概念。
3.1.1 蜂群作战自然界中的蜜蜂,一旦遭到外敌入侵,就会倾巢出动,依靠数量优势、飞行灵活等特点群起而攻之,往往可以达到让猎物落荒而逃的效果。
在未来战场上,急需组建这样一支由大规模、低成本的小型无人机构成的“蜜蜂”战队,依靠携带的大量攻击性武器载荷围攻目标,或靠携带的电子侦察设备为指挥控制系统提供实时的战场态势信息,或靠携带的电子干扰设备破坏敌防空系统。
蜂群作战的典型特点是依靠数量的绝对优势取得战争的胜利。群体中的个体功能简单、智能性较低,通过分布式的协同控制策略,得以保持整体行为,形成较高的威胁力和战斗力。蜂群是一个典型的分布式系统,依靠分布式系统的鲁棒性、自组织性等特点,即使系统中的部分个体遭受损伤,依然可以自动重新构建分布式网络,保证任务的顺利完成。由于对个体的智能性要求不高,故相应的无人机成本较低。可视任务需要采用微小型旋翼无人机或是固定翼无人机。此外,蜂群作战系统鲁棒性好,个体损失不影响整体任务的执行,故也进一步降低了系统的整体成本。
3.1.2 忠诚的僚机蜂群中的角色分工非常普遍,比如有蜂王、工蜂。蜂王,又称母蜂或是蜂后,是蜂群的主要繁殖者,寿命长,能产卵,能分泌蜂王物质维持蜂群次序。而工蜂寿命短,像侍者一样照应蜂王的需求,比如提供食物、清理垃圾等。
在未来战场中,有人机作为“蜂王”,无人机作为“工蜂”,无人机忠诚地围绕在有人机的周围,为有人机的作战需求提供必要的侦察、打击、诱骗等功能,无人机群被称之为忠诚的僚机。美空军已经开展“忠诚的僚机”项目,目前已经开展了2次演示验证试验,代号为“Have Raider Ⅱ”。美空军于2018年开始试飞“蜂王”飞机,以期能够完全控制“忠诚僚机”无人机编队,试验将持续到2022年。
“忠诚的僚机”的本质就是有人机/无人机协同作战,这也是目前空战系统的重要研究方向之一。为了保证系统的可靠性和稳定性,降低系统的智能成本,“人在回路”的设计十分必要。领导者-跟随者机制是解决有人机/无人机协同的有效手段之一[]。与蜂群作战群起而攻之相比,忠诚的僚机作战方案更强调主次分明。有人机是僚机(无人机)的保护对象,是系统中的高价值设备。僚机主要是作为有人机的“保护壳”,帮有人机抵挡炮火的攻击,甚至作为诱饵迷惑敌方,使之无法确定有人机的准确位置。
3.1.3 组队协作蜂群在寻找食物源的时候,可分为引领蜂、侦察蜂和跟随蜂。引领蜂储存有某一个食物源的相关信息,并且将这些信息以一定的概率与其他蜜蜂分享。侦察蜂是搜索蜂巢附近的新食物源,跟随蜂则是在蜂巢里面通过与引领蜂分享相关信息找到食物源。
围绕“食物源”这一搜索目标,有人机看作引领蜂,无人机系统被分为侦察、跟随等多个功能子群。每个子群中的无人机个体携带同样的传感器/有效载荷,执行同样的任务。不同无人机子群之间、以及无人机和有人机之间协同配合,共同完成协作任务。
在这种作战模式下,系统的层级化思想进一步得到体现,作战效能得到进一步的提升[]。不同功能子群(无人机群)有一个共同的领导者(有人机或人在回路的无人机),而功能子群内可以根据任务需要执行蜂群作战策略(即完全的分布式系统)或是忠诚的僚机策略(即领导者-跟随者系统)。有人机是系统的大脑,负责指挥决策,是系统最核心的部分,无人机功能子群可以作为有人机功能的延伸,携带光电设备、武器弹药等在有人机的指示下前出执行具体任务。
3.1.4 狼群作战狼群作战的思想是头狼依靠速度优势负责侦察,摸清敌方分布之后,带领群狼选定目标集中火力攻击,以局部多打少的优势一举歼灭敌人。取得成果后,集体撤退再次隐蔽,头狼佯攻,侦察并分散敌人注意力,以备发动第2次狼群突袭。
狼群战术是层级化结构和时序逻辑思维相结合的产物。头狼无人机通常为高价值无人机或是有人机,依靠速度快、机动灵活、隐身性能好等特点,获得敌方有效态势信息,并据此做出战术决策,指挥其他无人机(群狼)在合适的战机时蜂拥而上,迅速取得胜利之后立即集体撤退,等待头狼无人机的下次作战指令。狼群作战的前提是头狼无人机已经摸清地方信息并且确认敌方人数少的时候,才会发动攻击指令给群狼无人机。
狼群作战的优势是机动灵活、见好就收、众狼一心。在特定作战场景下,可以起到奇袭的效果。狼群作战强调角色分配以及任务执行的逻辑性,更适合于情况较为复杂的集群作战任务。
3.2 共性关键技术总结来说,从蜂群作战、忠诚的僚机、组队协同到狼群作战,实际上是从简单到复杂的策略演化过程。但无论何种作战模式,要实现集群实用化,需要解决的共性关键技术主要包括以下几点。
1) 面向复杂作战任务的调度与管理技术
该关键技术旨在发展先进的算法和软件,提高任务规划和态势感知能力。面对复杂作战任务,能够帮助相关人员快速做出合理的决策。通过构建开放式的体系架构和任务分配系统,根据具体需求合理规划和配置无人机、有人机的种类、数量、性能、载荷等。同时地面站与空中管理系统配合,对集群状态进行监控和实时调整。此外,基于上述架构和现有设备,实现各类机载设备接口的标准化,做到即插即用,提升作战灵活性。
调度与管理技术是组队协作和狼群作战两种策略最顶层、最关键的技术难点之一,决定作战的灵活性和作战效率。其中涉及的关键技术包括任务分解、资源管理、调度算法、网络结构、机群划分和任务分配等。在有限的装备和物资条件下,如何以较低的配置,高效、快速地完成指定任务是面向复杂作战任务的调度与管理技术的最终目标。
2) 小型无人机平台技术
该关键技术包含以下几个方面:①平台低成本化。需要搭建一次性或是有限寿命的作战平台,在满足作战需要的前提下,尽量采用低成本的材料、制造工艺(如3D打印)等来降低成本。如美海军主导的“低成本无人机蜂群(LOCUST)”项目。②空中的携带、投放和回收。目前的方案大多是由大型运输机或是轰炸机携带大量小型无人机,飞抵指定的位置投放,大量小型无人机前出执行侦察、攻击或是干扰任务,任务完成后或是电量不足时再由大型运输机回收。小型无人机可在大型运输机上通过充电的方式反复使用。投放的方式可以是弹射或是布撒。美海军于2019年3月19日利用4架HIVES多旋翼无人机以空中抛洒的方式释放百架的近距离隐蔽自主一次性无人机(CICADA)。而“灰山鹑”无人机则是由F/A-18战斗机携带,从用于发射照明弹的发射器中弹射的方式释放。小精灵项目则是由C-130运输机携带,利用导弹通用发射管发射“郊狼”无人机。C-130运输机有2种回收方案:一是通过尾舱门回收,从尾舱门向下伸出顶端有回收装置的机械臂,无人机挂到回收装置上完成回收。二是通过机翼挂架回收,挂架可通过金属缆绳与飞机分离,在飞机下方与无人机结合后,再由缆绳拉回并与飞机固定完成回收。按照项目计划,拟在30 min的时间内回收4架无人机。
3) 小型无人机间的通信链路技术
通过数据链实现蜂群之间、蜂群内无人机之间的互联互通,是实现集群协同的基础。设计合适的通信拓扑、通信协议等,保障信息的高效、远距离传输,从而为任务的顺利完成奠定基础。
在强对抗环境中,敌方会通过电磁干扰、网电攻击等手段中断或降级我方的数据链路,使得GPS信号丢失、情报信息无法及时获得。为此美国DARPA开展了多个项目,探索强对抗环境下的通信、组网、导航、雷达对抗等技术。例如,美军开展的“满足任务最优化的动态适应网络”(DyNAMO)项目,旨在发展网络动态适应技术,在面对主动电子干扰时,仍可安全、及时的实现高速通信。
由于受带宽和传输距离的影响,针对大规模的无人机系统,无法实现所有个体的点到点通信。因此,在保证集群行为实现的前提下,如何设计出高效、可靠的通信协议是当前尤为关键的技术难点之一。此外,由于成本所限,无人机的硬件配置决定了系统的采样频率,邻居信息是否可以及时、可靠地传递,也是通信协议设计时需要考虑的因素之一。
目前最新的室外集群飞行实验,主要还是基于固定拓扑的情况[]。而自然界中的鸟群、鸽群等显然并非固定拓扑,即每个个体的邻居关系随时间发生变化。因此,在时变拓扑下,如何优化集群行为,也是需要解决的难点之一。
4) 分布式协同控制技术
分布式协同控制技术是集群作战的核心技术之一,旨在发展先进的算法,使无人机集群在一名操作人员的管理下合作完成搜索、跟踪、打击等任务。协同控制技术决定了单个无人机在集群作战中的轨迹以及无人机系统在飞行过程中的整体行为。该关键技术包括集群组网、自主编队、态势感知、协同规划等方面的功能。
集中式控制方法虽然效率较高,但核心无人机一旦被击落,系统就会崩溃,无法继续执行任务。而采用分布式的控制方法,可以有效降低系统成本、提高系统机动性和鲁棒性。
为了完成集群作战任务中的分布式协同控制,涉及到的基本技术很多,包括搜索与感知、目标识别与定位、路径规划等,这些技术是普通智能装备所必需的。因此,这里重点分析基于这些技术所提供的有效信息(如个体自身的位姿信息、个体与邻居间的相对位置、邻居相对个体的方位信息等),如何高效复现集群行为,从而保证系统顺利完成集群作战任务。控制的目标有3个:个体行为的一致性(速率、方向一致)、个体间避免碰撞以及个体相互靠近形成一个较为密集的队形。控制的结果有2种:一种是直线型集群运动[],另一种是旋转型集群运动[]。
4 结论综上所述,无人机集群作战是受蜂群、鱼群、鸟群等低等群居动物的大规模集群现象启发所产生的一种新型作战模式。
本文介绍了无人机集群的研究动机,从模型、协议和平台3个角度总结了研究方法,重点分析了几种典型作战模式以及涉及的若干关键技术。大规模、低成本的小型无人机系统可利用机间的通信网络实现协同侦察、协同打击、协同干扰等功能,未来可有效应用于反恐维稳、远程突防、战机护航等作战任务。
参考文献
宋怡然, 申超, 李东兵. 美国分布式低成本无人机集群研究进展[J]. 飞航导弹, 2016(8): 17-22.
SONG Y R, SHEN C, LI D B. A review of the research on distributed, low-cost system for unmanned aerial vehicles (UAVs) swarm of the United States[J]. Aerodynamic Missile Journal, 2016(8): 17-22.
(in Chinese)
Cited By in Cnki
| Click to display the text
陈晶. 解析美海军低成本无人机蜂群技术[J]. 无人机, 2016(1): 24-26.
CHEN J. The US navy's low-cost swarming drone technology[J]. Unmanned Vehicles, 2016(1): 24-26.
(in Chinese)
Cited By in Cnki (5)
| Click to display the text
REYNOLDS C W. Flocks, herds, and schools:A distributed behavioral model[J]. ACM SIGGRAPH Computer Graphics, 1987, 21(4): 25-34.
Click to display the text
VICSEK T, CZIROK A, JACOB E B, et al. Novel type of phase transitions in a system of self-driven particles[J]. Physical Review Letters, 1995, 75(6): 1226.
Click to display the text
VICSEK T. A question of scale[J]. Nature, 2001, 411(6836): 421.
Click to display the text
JADBABAIE A, LIN J, MORSE A S. Coordination of groups of mobile autonomous agents using nearest neighbor rules[J]. IEEE Transactions on Automatic Control, 2003, 48(6): 988-1001.
Click to display the text
GAZI V, PASSINO K M. Stability analysis of swarms[J]. IEEE Transactions on Automatic Control, 2003, 48(4): 692-697.
Click to display the text
OLFATI-SABER R. Flocking for multi-agent dynamic systems:Algorithms and theory[J]. IEEE Transactions on Automatic Control, 2006, 51(3): 401-420.
Click to display the text
CUCKER F, SMALE S. Emergent behavior in flocks[J]. IEEE Transactions on Automatic Control, 2007, 52(5): 852-862.
Click to display the text
吕娜, 刘创, 陈柯帆, 等. 一种面向航空集群的集中控制式网络部署方法[J]. 航空学报, 2018, 39(7): 321961.
LYU N, LIU C, CHEN K F, et al. A method for centralized control network deployment of aeronautic swarm[J]. Acta Aerodynamic et Astronautica Sinica, 2018, 39(7): 321961.
(in Chinese)
Cited By in Cnki (1)
| Click to display the text
JING G, ZHENG Y, WANG L. Group flocking of multiple mobile agents[C]//33rd Chinese Control Conference, 2014: 1156-1161.
CHEN Y, CHANG S. An agent-based simulation for multi-UAVs coordinative sensing[J]. International Journal of Intelligent Computing and Cybernetics, 2008, 1(2): 269-284.
Click to display the text
CUCKER F, DONG J. Avoiding collisions in flocks[J]. IEEE Transactions on Automatic Control, 2010, 55(5): 1238-1243.
Click to display the text
BAYEZIT I, FIDAN B. Distributed cohesive motion control of flight vehicle formations[J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5763-5772.
Click to display the text
RAHIMI R, ABDOLLAHI F, NAQSHI K. Time-varying formation control of a collaborative heterogeneous multi agent system[J]. Robotics and Autonomous Systems, 2014, 62(12): 1799-1805.
Click to display the text
DONG X, YU B, SHI Z, et al. Time-varying formation control for unmanned aerial vehicles:Theories and applications[J]. IEEE Transactions on Control Systems Technology, 2015, 23(1): 340-348.
Click to display the text
周绍磊, 祁亚辉, 张雷, 等. 切换拓扑下无人机集群系统时变编队控制[J]. 航空学报, 2017, 38(4): 320452.
ZHOU S L, QI Y H, ZHANG L, et al. Time-varying formation control of UAV swarm systems with switching topologies[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(4): 320452.
(in Chinese)
Cited By in Cnki (2)
| Click to display the text
OYEKAN J. Bio-Inspired vision-based leader-follower formation flying in the presence of delays[J]. Robotics, 2016, 5(3): 18.
Click to display the text
KOWNACKI C. Multi-UAV flight using virtual structure combined with behavioral approach[J]. Acta Mechanica et Automatica, 2016, 10(2): 92-99.
Click to display the text
QIU H, DUAN H. Multiple UAV distributed close formation control based on in-flight leadership hierarchies of pigeon flocks[J]. Aerospace Science and Technology, 2017, 70: 471-486.
Click to display the text
ALFEO A L, CIMINO M G C A, DE F N, et al. Design and simulation of the emergent behavior of small drones swarming for distributed target localization[J]. Journal of Computational Science, 2018, 29: 19-33.
Click to display the text
JIA Y N, LI Q, ZHANG W C. A distributed cooperative approach for unmanned aerial vehicle flocking[J]. Chaos, 2019, 29(4): 043118.
Click to display the text
JIA Y N, YANG Y H, LI Q, et al. Aerial escort task using networked miniature unmanned aerial vehicles[J/OL]. (2019-08-30)[2019-09-11].International Journal of Control, https://www_tandfonline.xilesou.top/doi/abs/10.1080/00207179.2019.1661522.
BONABEAU E, DORIGO M, THERAULAZ G. Swarm intelligence-from natural to artificial systems[M]. Oxford: Oxford University Press, 1999.
KUMAR V. The 5S's of aerial robotics: Small, smart, safe, speedy and swarming[C]//CCF-GAIR, 2016.
HEADQUARTERS. United States air force unmanned aircraft systems flight plan 2016-2036[R]. Washington, D.C.: USAF, 2009.
CAMBONE S A. Unmanned aircraft systems roadmap 2005-2030[R]. Washington, D.C.: Office of the Secretary of Defense, 2005.
BALLERINI M, CABIBBO N, CANDELIER R, et al. Interaction ruling animal collective behavior depends on topological rather than metric distance:Evidence from a field study[J]. Proceedings of the National Academy of Sciences of the United States of America, 2008, 105(4): 1232-1237.
Click to display the text
COUZIN I D, KRAUSE J, FRANKS N R, et al. Effective leadership and decision-making in animal groups on the move[J]. Nature, 2005, 433(7025): 513-516.
Click to display the text
MEHES E, VICSEK T. Collective motion of cells:From experiments to models[J]. Integrative Biology, 2014, 6(9): 831-854.
Click to display the text
JIANG L, GIUGGIOLI L, PERNA A, et al. Identifying influential neighbors in animal flocking[J]. PloS Computational Biology, 2017, 13(11): e1005822.
Click to display the text
ALFEO A L, CIMINO M G C A, DE F, et al. Swarm coordination of mini-UAVs for target search using imperfect sensors[J]. Intelligent Decision Technologies, 2018, 12(2): 149-162.
Click to display the text
ANDREA C, ALESSIO C, IRENE G, et al. Scale-free correlations in starling flocks[J]. Proceedings of the National Academy of Sciences of the National Academy of Sciences of the United States of America, 2010, 107(26): 11865-11870.
Click to display the text
CISZAK M, COMPARINI D, MAZZOLAI B, et al. Swarming behavior in plant roots[J]. PloS One, 2012, 7(1): e29759.
Click to display the text
DEUTSCH A, THERAULAZ G, VICSEK T. Collective motion in biological systems[J]. Interface Focus, 2012, 2(6): 689-692.
Click to display the text
LI L, XIAO W B, QIU W, et al. New flocking models apply for UAV formation[J]. Journal of Physics:Conference Series, 2019, 1169: 012025.
Click to display the text
BENEDETTI M, DURSO F, FORTINO G, et al. A fault-tolerant self-organizing flocking approach for UAV aerial survey[J]. Journal of Network and Computer Applications, 2017, 96: 14-30.
Click to display the text
BAHLOUL N E H, BOUDJIT S, ABDENNEBI M, et al. A flocking-based on demand routing protocol for unmanned aerial vehicles[J]. Journal of Computer Science and Technology, 2018, 33(2): 263-276.
Click to display the text
DUAN H B, LI P. Autonomous control for unmanned aerial vehicle swarms based on biological collective behaviors[J]. Science & Technology Review, 2017, 35(7): 17-25.
Click to display the text
ZHANG T J. Unmanned aerial vehicle formation inspired by bird flocking and foraging behavior[J]. International Journal of Automation and Computing, 2018, 15(4): 402-416.
Click to display the text
QUINTERO S, COLLINS G, HESPANHA J. Flocking with fixed-wing UAVs for distributed sensing: A stochastic optimal control approach[C]//Proceedings of the American Control Conference, 2013: 2025-2031.
ZENKEVICH S L, GALUSTYAN N K. Decentralized control of a quadrocopter swarm[J]. Mechatronics, Automation and Control, 2016, 17(11): 774-82.
QIU H X, DUAN H B. Pigeon interaction mode switch-based UAV distributed flocking control under obstacle environments[J]. ISA Transactions, 2017, 71(1): 93-102.
Click to display the text
JIA Y N, LI Q, QIU S Q. Distributed leader-follower flight control for large-scale clusters of small unmanned aerial vehicles[J]. IEEE Access, 2018, 6: 32790-32799.
Click to display the text
MAO X, ZHANG H B, WANG Y H. Flocking of quad-rotor UAVs with fuzzy control[J]. ISA Transactions, 2018, 74: 185-193.
Click to display the text
ZHAO W, CHU H, ZHANG M, et al. Flocking control of fixed-wing UAVs with cooperative obstacle avoidance capability[J]. IEEE Access, 2019, 7: 17798-17808.
Click to display the text
DAI F, CHEN M, WEI X, et al. Swarm intelligence-inspired autonomous flocking control in UAV networks[J]. IEEE Access, 2019, 7: 61786-61796.
Click to display the text
SHEN J. Cucker-smale flocking under hierarchical leadership[J]. Society for Industrial and Applied Mathematics, 2006, 68(3): 694-719.
LI B, LI J, HUANG K W. Modeling and flocking consensus analysis for large-scale UAV swarms[J]. Mathematical Problems in Engineering, 2013, 2013: 368369.
Click to display the text
VIRÁGH C, VASARHELYI G, TARCAI N, et al. Flocking algorithm for autonomous flying robots[J]. Bioinspiration and Biomimetics, 2014, 9(2): 025012.
Click to display the text
HUNG S, GIVIGI S N. A Q-learning approach to flocking with UAVs in a stochastic environment[J]. IEEE Transactions on Cybernetics, 2017, 47(1): 186-197.
Click to display the text
VASARHELYI G, VIRAGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3(20): eaat3536.
Click to display the text
PARANJAPE A A, CHUNG S, KIM K, et al. Robotic herding of a flock of birds using an unmanned aerial vehicle[J]. IEEE Transactions on Robotics, 2018, 34(4): 901-915.
Click to display the text
GARCIA G, KESHMIRI S. Biologically inspired trajectory generation for swarming UAVs using topological distances[J]. Aerospace Science and Technology, 2016, 54: 312-319.
Click to display the text
KOWNACKI C, OLDZIEJ D. Fixed-wing UAVs flock control through cohesion and repulsion behaviors combined with a leadership[J/OL]. (2016-01-12)[2017-05-15]. International Journal of Advanced Robotic Systems, https: //doi.org/10.5772/62249.
HE L L, BAI P, LIANG X L, et al. Feedback formation control of UAV swarm with multiple implicit leaders[J]. Aerospace Science and Technology, 2018, 72: 327-334.
Click to display the text
CHEN M, DAI F, WANG H, et al. DFM:A distributed flocking model for UAV swarm networks[J]. IEEE Access, 2018, 6: 69141-69150.
Click to display the text
BEN-ASHER P G Y, FELDMAN S, FELDMAN M. Distributed decision and control for cooperative UAVs using ad hoc communication[J]. IEEE Transactions on Control System Technology, 2008, 16(3): 511-516.
Click to display the text
KHARE V R, WANG F Z, WU S, et al. Ad-hoc network of unmanned aerial vehicle swarms for search and destroy tasks[C]//4th International IEEE Conference on Intelligent Systems. Piscataway: IEEE Press, 2008: 665-672.
HAUERT S, LEVEN S, VARGA M, et al. Reynolds flocking in reality with fixed-wing robots: Communication range vs maximum turning rate[C]//IEEE/RSJ International Conference on Intelligent Robot System, 2011: 5015-5020.
KIM S W, SEO S W. Cooperative unmanned autonomous vehicle control for spatially secure group communications[J]. IEEE Journal on Selected Area in Communications, 2012, 30(5): 870-882.
Click to display the text
LUO F, JIANG C, DU J, et al. A distributed gateway selection algorithm for UAV networks[J]. IEEE Transactions on Emerging Topics in Computing, 2015, 3(1): 22-33.
Click to display the text
BAYEZIT I, FIDAN B. Distributed cohesive motion control of flight vehicle formations[J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5763-5772.
Click to display the text
CAO W, XU W. A new multi-UAV cooperation method[C]//9th International Symposium on Computational Intelligence and Design, 2016: 231-234.
JIA Y N. Swarming coordination of multiple unmanned aerial vehicles in three-dimensional space[C]//AIAA Modeling and Simulation Technologies Conference. Reston: AIAA, 2016.
CIARLETTA L, GUENARD A, PRESSE Y, et al. Simulation and platform tools to develop safe flock of UAVs: A cps application-driven research[C]//International Conference on Unmanned Aircraft Systems, 2014: 95-102.
CORNER J J, LAMONT G B. Parallel simulation of UAV swarm scenarios[C]//Proceedings of the Winter Simulation Conference, 2004: 363-371.
MENDEZ L, GIVIGI S N, SCHWARTZ H M, et al. Validation of swarms of robots: Theory and experimental results[C]//7th International Conference on System of Systems Engineering, 2012: 332-337.
SASKA M. Mav-swarms: Unmanned aerial vehicles stabilized along a given path using onboard relative localization[C]//International Conference on Unmanned Aircraft Systems, 2015: 894-903.
GIL A E, PASSINO K M, GANAPATHY S. Cooperative task scheduling for networked uninhabited air vehicles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 4(2): 561-581.
Click to display the text
JOELIANTO E, SAGALA A. Swarm tracking control for flocking of a multi-agent system[C]//IEEE Conference on Control, Systems and Industrial Informatics, 2012: 75-80.
VÁSÁRHELYI G, VIRÁGH C, SOMORJAI G, et al. Outdoor flocking and formation flight with autonomous aerial robots[C]//IEEE/RSJ International Conference on Intelligent Robot Systems. Piscataway: IEEE Press, 2014: 3866-3873.
BARABASI A-L, ALBERT R. Emergence of scaling in random networks[J]. Science, 1999, 286(5439): 509-512.
Click to display the text
FANG H, WEI Y, CHEN J, et al. Flocking of second-order multiagent systems with connectivity preservation based on algebraic connectivity estimation[J]. IEEE Transactions on Cybernetics, 2017, 47(4): 1067-1077.
Click to display the text
SOORKI M N, TAVAZOEI M S. Adaptive robust control of fractional-order swarm systems in the presence of model uncertainties and external disturbances[J]. IET Control Theory & Applications, 2018, 12(7): 961-969.
Click to display the text
SAHU B K, SUBUDHI B. Flocking control of multiple AUVs based on fuzzy potential functions[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(5): 2539-2551.
Click to display the text
YAZDANI S, HAERI M, SU H. Sampled-data leader-follower algorithm for flocking of multi-agent systems[J]. IET Control Theory and Applications, 2019, 13(5): 609-619.
Click to display the text
ZHAN J, LI X. Flocking of multi-agent systems via model predictive control based on position-only measurements[J]. IEEE Transactions on Industrial Informatics, 2013, 9(1): 377-385.
Click to display the text
ISKANDARANI M, GIVIGI S N, FUSINA G, et al. Unmanned aerial vehicle formation flying using linear model predictive control[C]//8th Annual IEEE System Conference, 2014: 18-23.
ZHANG H, LIU B, CHENG Z, et al. Model predictive flocking control of the cucker-smale multi-agent model with input constraints[J]. IEEE Transactions on Circuits and Systems I, 2016, 63(8): 1265-1275.
Click to display the text
DONG J, QIU L. Flocking of the cucker-smale model on general digraphs[J]. IEEE Transactions on Automatic Control, 2017, 62(10): 5234-5239.
Click to display the text
ZHANG H, CHENG Z, CHEN G, et al. Model predictive flocking control for second-order multi-agent systems with input constraints[J]. IEEE Transactions on Circuits and Systems I, 2015, 62(6): 1599-1606.
Click to display the text
RAO S, GHOSE D. Sliding mode control-based autopilots for leaderless consensus of unmanned aerial vehicles[J]. IEEE Transactions on Control System Technology, 2014, 22(5): 1964-1972.
Click to display the text
JIA Y N, VICSEK T. Modeling hierarchical flocking[J]. New Journal of Physics, 2019, 21: 093048.
Click to display the text
JIA Y N, WANG L. Decentralized formation flocking for multiple non-holonomic agents[C]//6th IEEE International Conference on Cybernetics and Intelligent Systems. Piscataway: IEEE Press, 2013: 100-105.
BENNO L, DEMIAN L. The rotating vicsek model:Pattern formation and enhanced flocking in chiral active matter[J]. Physical Review Letters, 2016, 119(5): 058002.



